Micromouse
My team and I built, from scratch, a small autonomous robotic ‘mouse’ that can solve a randomly generated 16x16 cell maze (each cell is a 180 mm square with walls 50 mm high). My responsibilities included: design and fabrication of chassis and sensor mounts using SketchUp, design of PCB using EAGLE, wiring and soldering electronic components, and developing solving algorithm.
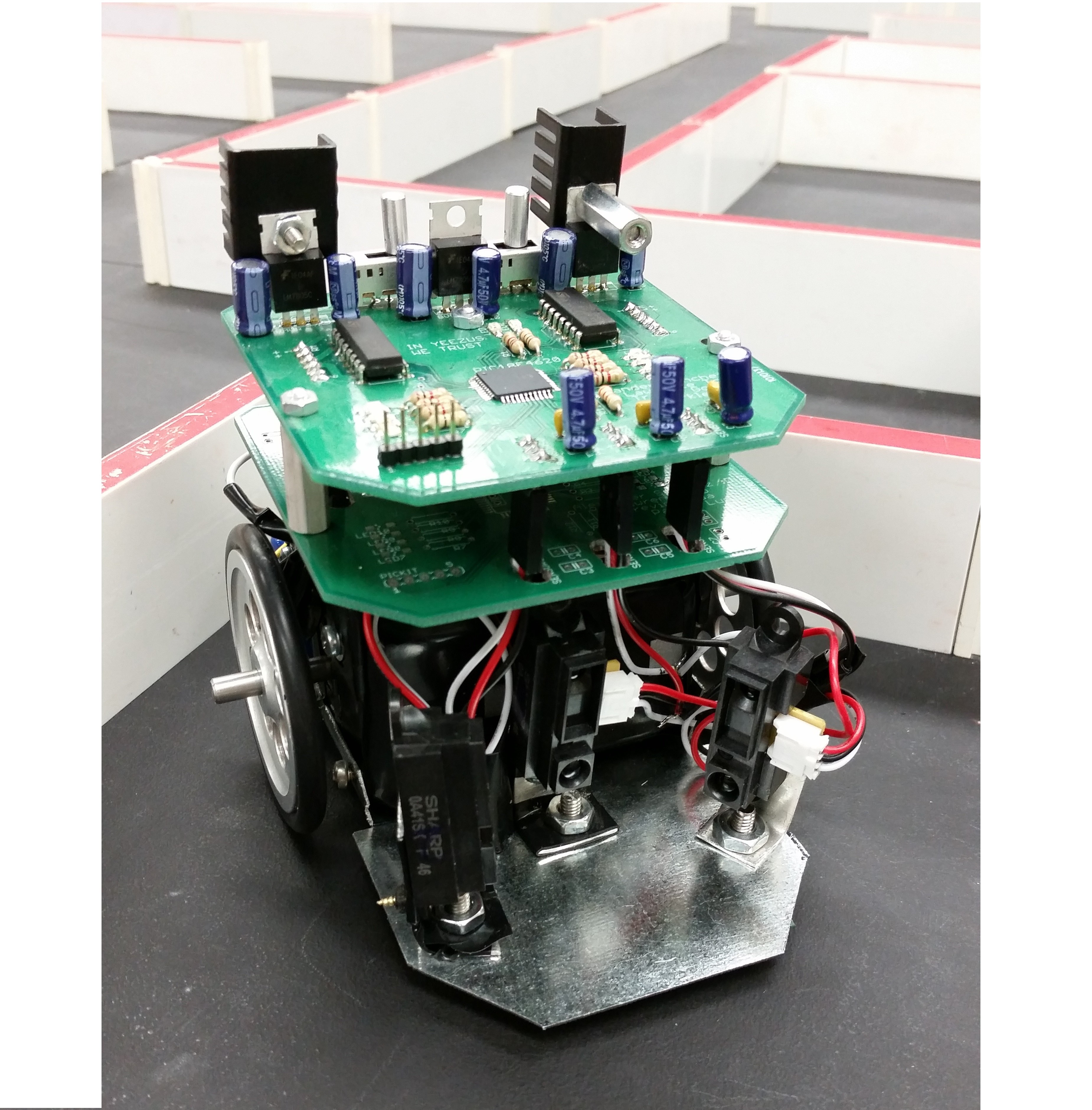 Final mouse design.
Final mouse design.
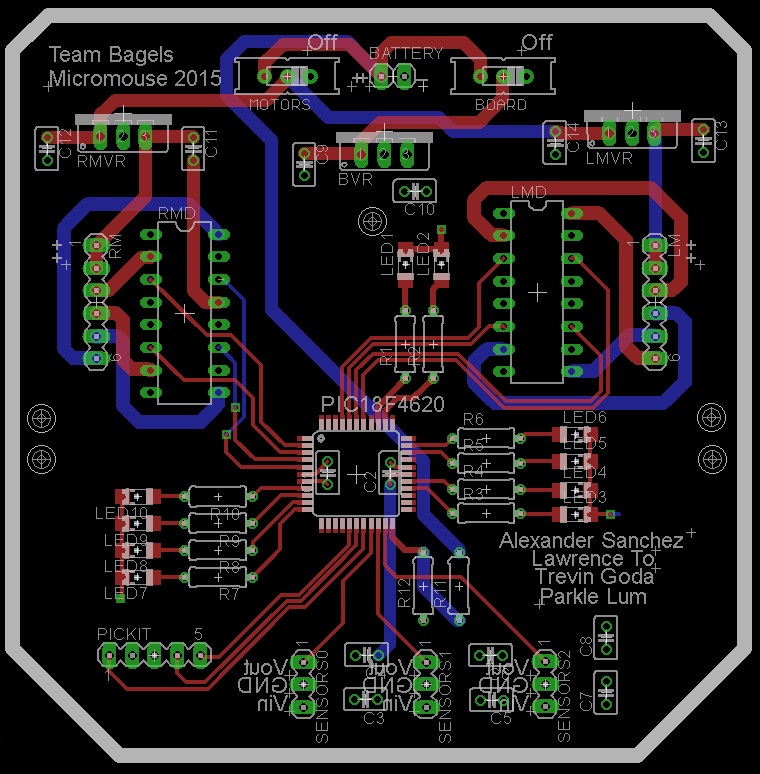
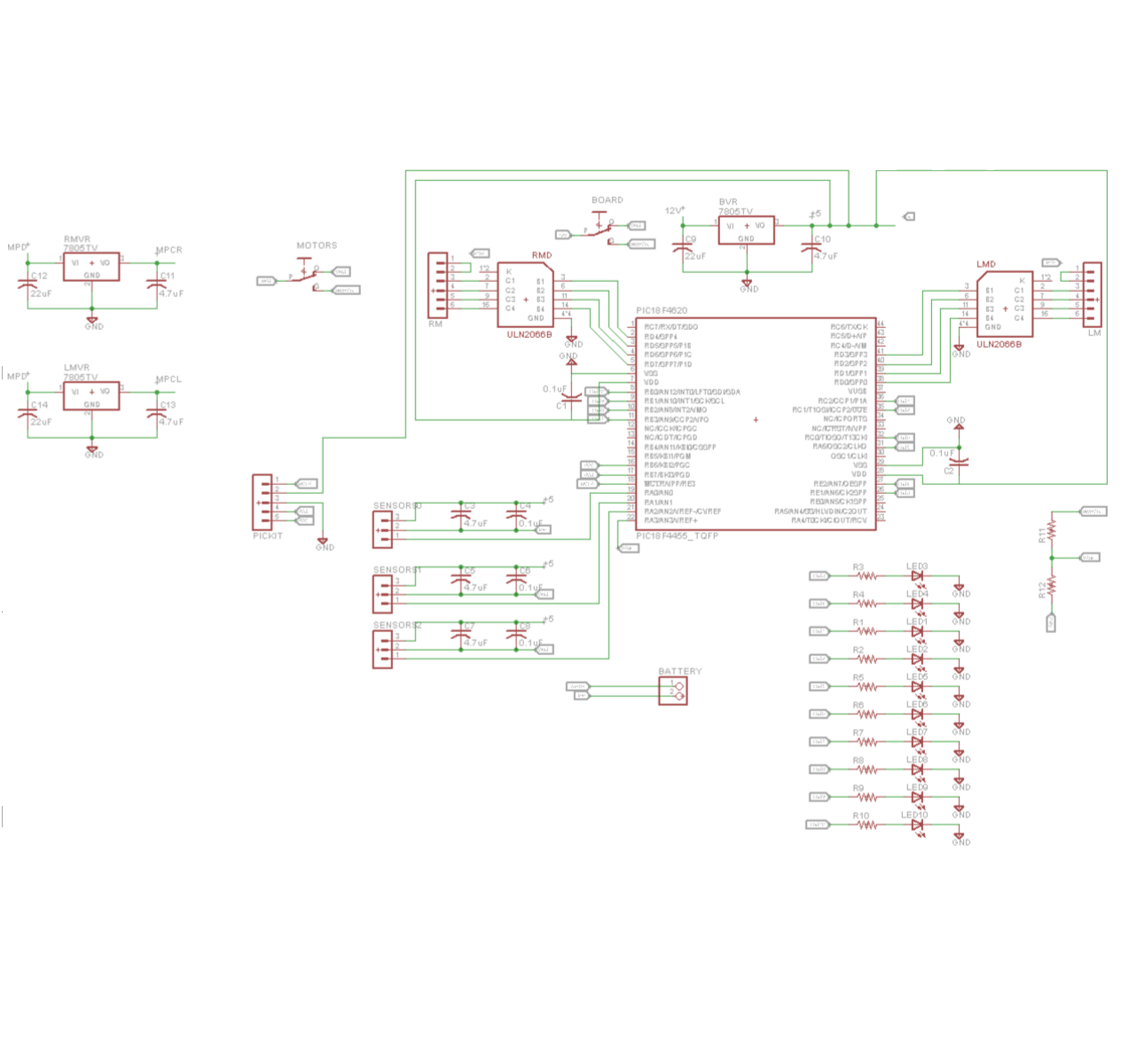 Eagle PCB schematics.
Eagle PCB schematics.
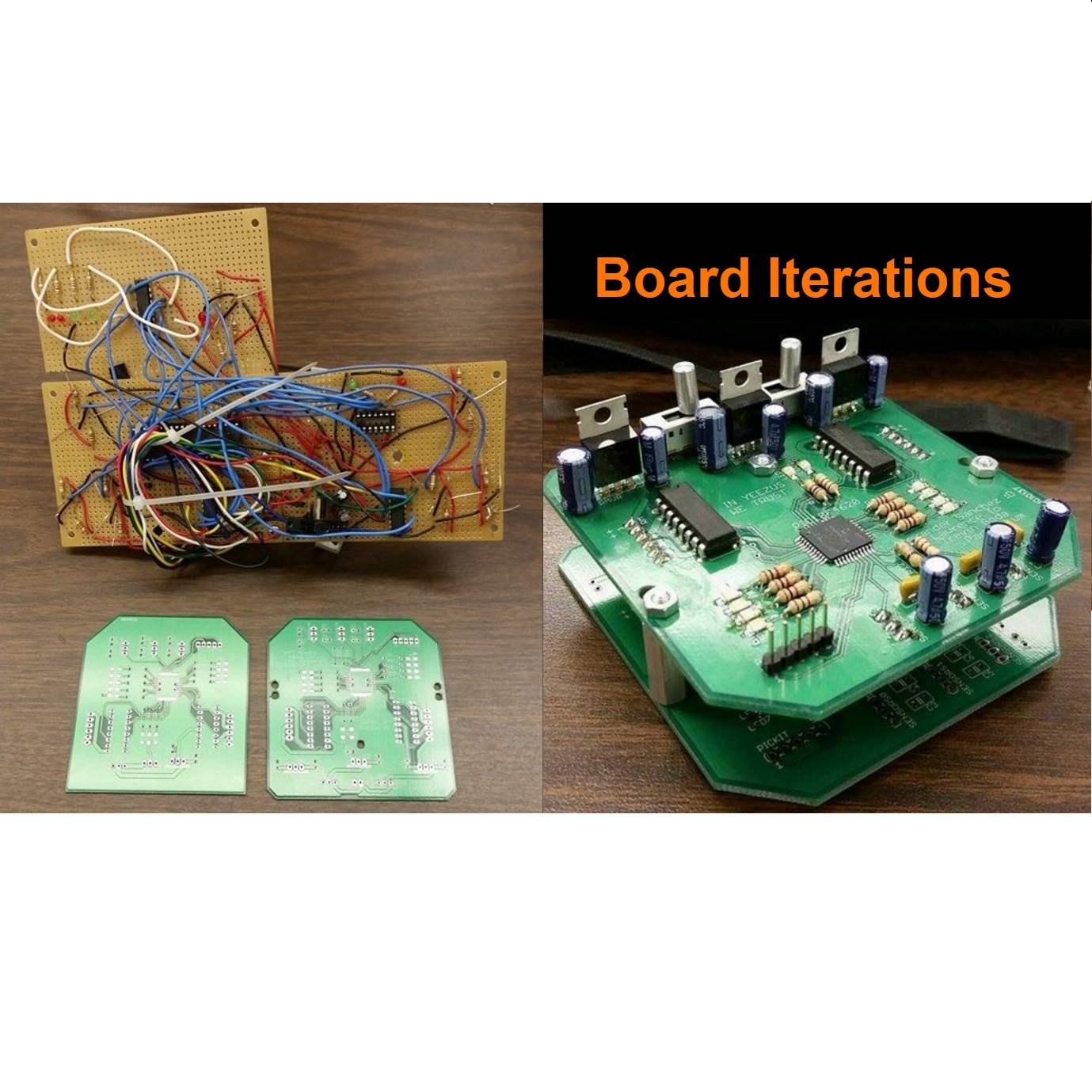 Board iterations.
Board iterations.
You can learn more at the UH Micromouse Website.